免责声明
- 本文标题仅为形式上的表述,不具有任何实质性含义。无论清华大学(THU)今年是否举行相关考试,均与本文作者无关,作者对此不承担任何责任。
- 本文内容仅代表作者个人观点,不代表任何组织、机构或个人的立场。
- 本文旨在对 UCT(信心上限树)算法进行解释与说明,仅供读者参考。文中所述内容不构成任何形式的建议或承诺,读者应自行判断并承担相应的风险。
- 作者不对因使用本文内容而产生的任何直接或间接损失承担责任。
特此声明。
学会了这个,我能获得什么?
你能够通过 THUWC 2024 的 Day2 工程题:四子棋,
以及 THUSC 2024 的 Day2 工程题:wordle。
UCT 均为这两题的官方正解(讲题人说的),可见近几次来 THU 非常喜欢在他的营中放 UCT。
或许过几周之后这个列表又会更新?
博弈问题的定义
在下文中我们所要解决的博弈问题定义如下:
- 双人
- 一人一步
- 双方信息完备(博弈双方所得到的信息是一样的,不存在一方能看到,而另一方看不到的情况。)
- 零和(属非合作博弈。 它是指参与博弈的各方,在严格竞争下,一方的收益必然意味着另一方的 损失,博弈各方的收益和损失相加总和永远为“零”,故双方不存在合作的可能。 零和博弈的结果是一方获利而另一方损失,且一方的所得正是另一方的所失,整个社会的利益并不会因此而增加一分。)
alpha-beta 搜索
博弈问题可以贪心嘛?
如何贪心?——极大-极小模型。
由于博弈是零和的,所以我们建出一颗价值树,树上的节点储存这个点对于我方的价值,有利则非常大,无利则非常小。
那么每一次则为先选择价值最大的,然后选择价值最小的,然后选择价值最大的,然后选择价值最小的……
这样显然不对,因为有可能某一步暂时对我方不利的,里面可以走向对我方非常有利的。
结论:不能贪心。
博弈问题可以穷举嘛?
以中国象棋为例:
时间:总状态数约为\(10^{150}\),假设 \(1\) 微毫秒走一步,约需要 \(10^{134}\) 年。而宇宙年龄 \(1.38\times 10^{10}\) 年。
空间:如果一个原子储存一个状态,需要 \(10^{100}\) 个地球。
结论:不可能。
可以在有限步数内穷举嘛?
深蓝走一步需要搜索 \(12\) 步,如果全部搜完,时间确实短了很多——需要 \(17\) 年。
结论:不可能。
alpha-beta 剪枝则为综合了上述两种算法,对于明确无利的一种状态不去选择的算法。
由于这不是这篇文章的重点,所以一笔带过。
alpha-beta 剪枝的局限性
alpha-beta 剪枝在围棋上会失效?
是因为状态多嘛?不是本质原因。
本质原因是,我们需要对于局面进行估价。
估价需要:大量的专家知识;知识的统一性问题(围棋怎么走才算好,目前没有定论);人工整理(人力物力财力)。
蒙特卡洛方法
蒲丰投针问题:设我们有一个以平行且等距木纹铺成的地板(如概述图),随意抛一支长度比木纹之间距离小的针,求针和其中一条木纹相交的概率。 并以此概率,蒲丰提出的一种计算圆周率的方法——随机投针法。 这就是蒲丰投针问题。
我们同样可以用在博弈上:
从当前局面的所有可落子点中随机选择一个点落子
重复以上过程
直到胜负可判断为止
经多次模拟后,选择胜率最大的点落子
蒙特卡洛树搜索:
- 建出搜索树
- 选择:随机选择一个已经搜索过的节点进行搜索
- 拓展:随机选择这个节点的下一步
- 估价:计算这个节点的权值(随机模拟向下走直到胜负可判断为止),计算收益
- 回传:回传收益(每次回传一个节点要将收益乘以 \(-1\),因为对后手有利的局面则对于先手无利)
- 重复若干次后选择最有利的节点走
蒙特卡洛树搜索的局限性与信心上限
对尚未充分了解的节点的探索
对当前具有较大希望节点的利用
我们可以引入信心上限(UCB,Upper Confidence Bound)一概念来处理。
定义一个节点的信心上限为: \[ I_v=\overline{X_v}+\sqrt{\dfrac{2\ln(T_u)}{T_v}} \] 其中 \(\overline{X_v}\) 为节点 \(v\) 所有收益的平均值,而 \(T_v\) 则表示这个节点的访问次数。
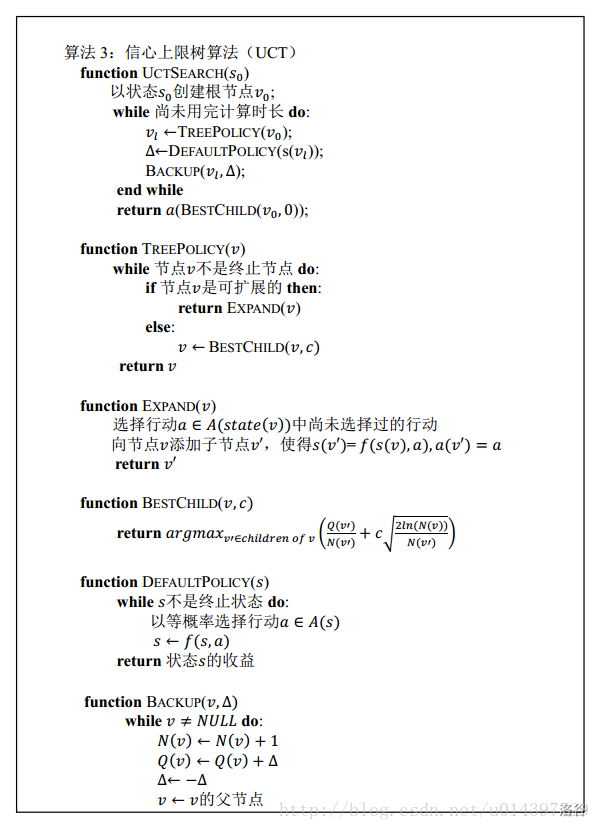
信心上限树
将 UCB 算法应用于蒙特卡洛树搜索中,用于选择可落子点:
在选择操作时,节点不是随机选择,而是根据 UCB 选择信心上限值最大的节点
一般使用时,我们会加入一个参数 \(c\),调节算法选择探索需求还是选择利用需求:
\[ I_v=\overline{X_v}+c\sqrt{\dfrac{2\ln(T_u)}{T_v}} \]
参考资料
- AdversarialSearch.pdf(THUWC 2024 Day2 工程题下发文件,很遗憾,我暂时不能将其上传)
- https://blog.csdn.net/u014397729/article/details/27366363
评论